



Mining Operations
The process of extracting valuable minerals and resources from the Earth through various methods.
Types of Mining
Surface Mining – Extracting minerals and ores from the Earth's surface.
Quarry Mining – Open-pit excavation for stones, aggregates, and minerals.
Rock Mining – Extraction of solid rock deposits near the surface.
Underground Mining – Extracting minerals from deep below the Earth's surface.
Mining Equipment & Operations
Loading Sites – Locations where minerals are loaded onto haul trucks for transport.
Unloading Sites – Locations where mined materials are offloaded for processing or storage.
Haul Trucks – Transport minerals between dynamic loading and fixed unloading sites.
Loaders – Heavy machinery used to scoop and load minerals onto haul trucks.
IoT Device Installation & Tracking
All haul trucks are installed with sensor tracking devices that stream data from 100+ sensors to our data lake, enabling real-time monitoring and analytics.
Stages of a Haul Truck's Journey
Loading – The loading sites are dynamic and can change locations across days.
Journey to Unloading Site – Tracking the haul truck’s journey from loading to unloading.
Unloading – The unloading sites have fixed geolocations, allowing automated inference of unloading stops.
Return Journey to Loading Site – Tracking the truck’s journey back to the loading site.
Idling Stops – Stops at locations other than loading and unloading sites, where the vehicle is deemed idle.
Objective
We can only optimize what we can measure. The productivity of a mining site is determined by the total tonnage mined, while costs are driven by the fuel consumed to mine it. By tagging each vehicle’s journey across different operational stages, we can measure key metrics at each phase, identify inefficiencies, and unlock opportunities for optimization.
Challenges & Limitations
Sparse or Absent Payload Data – The ideal solution is the payload sensor, which provides real-time weight data, but access to this sensor is not available for some reasons.
Unreliable Sensor Availability – Due to variations in OEMs and truck models, different vehicles send different subsets of sensor data.
Absent Geolocation Data in Underground Mines – Lack of GPS signals in underground operations prevents spatial tracking, limiting operational insights.
Problem Statement
Without access to the ground truth and considering the challenges stated above, develop an approach to infer these stages effectively.
High Level Approach
- Generating Labeled Data Without Ground Truth
In the absence of labeled data, we need a method to approximate labels with high confidence. This could involve clustering sensor patterns, anomaly detection, or rule-based heuristics that align with expected behaviors.
- Inferring Stages from Sensor Data
Any vehicle, when loaded or unloaded, exhibits a change in dynamics before and after the event. This change is reflected in certain sensor readings (e.g., engine load, suspension pressure, speed variations). By analyzing these sensor patterns, we can infer loading and unloading events.
- Handling Sparse and Inconsistent Sensor Data
The more sensors we can use, the more robust the model will be to missing data. If a few sensors are missing, other correlated sensors can help compensate.
Handling Speed Bias
Sensor readings can vary depending on the truck's speed, leading to potential misinterpretations.
To account for this, we compare sensor values pre and post-stop only when the vehicle is moving at similar speeds.
We create speed-normalized sensor features by bucketing sensor readings into speed ranges and adjusting the comparisons accordingly.
This ensures that differences in sensor values truly reflect loading/unloading events rather than speed-related variations.
Model Training
Diagrammatic Representation of Model Training Approach
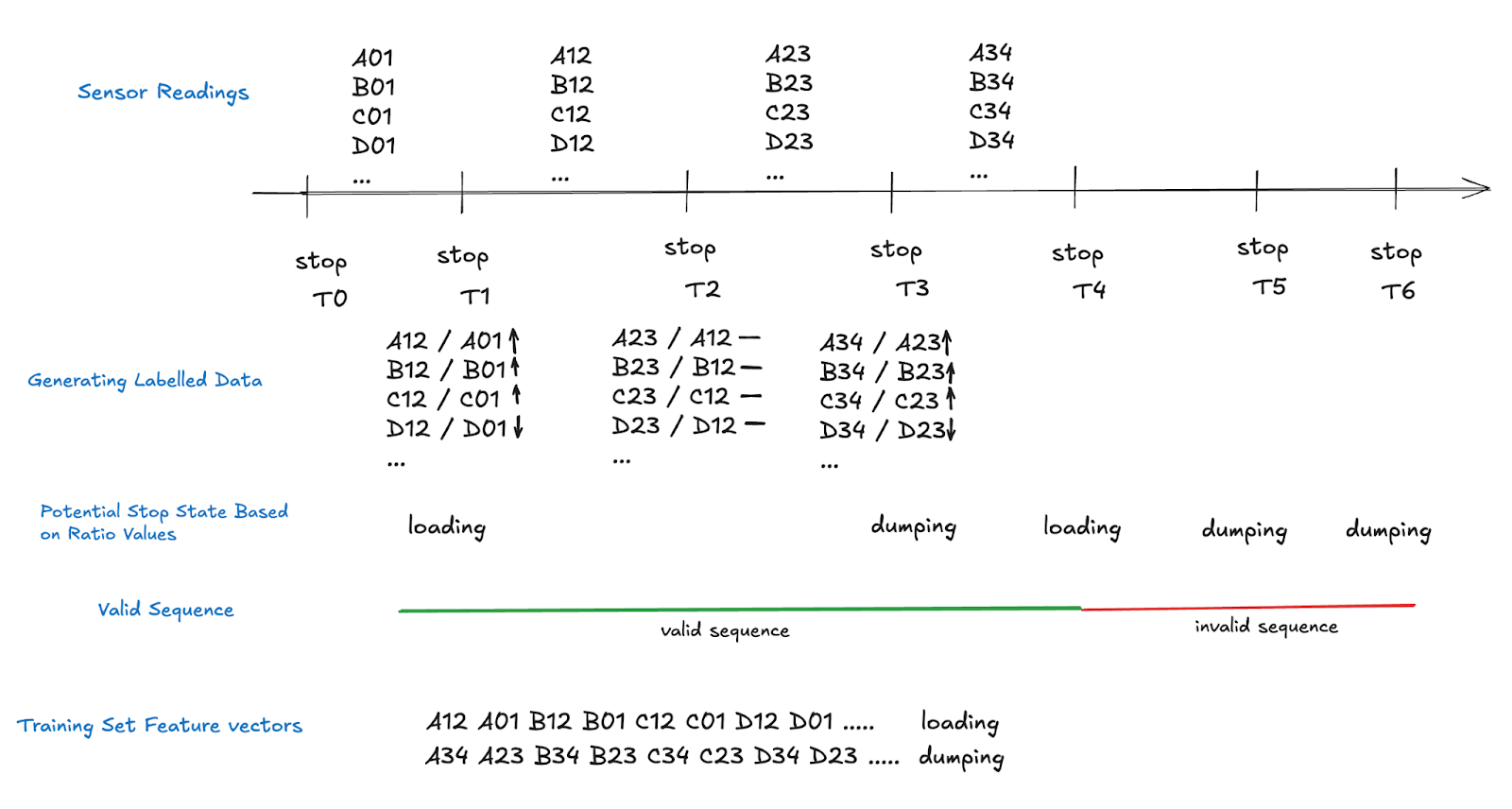
Generating Labeled Data
To classify truck operations accurately, we first utilize speed and RPM sensors to segregate moving and stopped cycles.
Key Assumptions & Approach:
Expected Behavior: In an ideal scenario, each stop corresponds to either a loading or unloading event, with zero idling in between.
Sensor Pattern Analysis: Loading and unloading events exhibit inverse patterns in readings of impacted sensors.
Pattern-Based Labeling: We identify continuous time windows where the sequence of stopped cycles aligns with expected loading/unloading behavior. If the pattern deviates, we terminate the sequence to maintain data integrity.
Confidence Threshold: To ensure reliability, we require at least three sensors to show significant ratio changes before confirming a loading or unloading event.
Domain Expertise Integration: Subject matter experts analyze key sensor ratios, validating whether observed changes correspond to loading or unloading events.
This structured approach enables high-confidence labeling, even in the absence of explicit ground truth data.
Feature Engineering
Pre-Stop Sensor Means: The average sensor readings recorded during the moving phase before a stop, after filtering out outliers in the 5th-95th percentile range.
Post-Stop Sensor Means: The average sensor readings recorded during the moving phase after a stop, after removing outliers in the 5th-95th percentile range.
Training Process
Model Choice: We use an XGBoost classifier as the initial model due to its strong performance in handling structured data.
Separate Loading and Unloading models are trained to enhance prediction accuracy.
Feature Selection: The model is initially trained using all available sensors to capture a wide range of operational patterns.
SHAP (SHapley Additive exPlanations) values are utilized to assess sensor importance, allowing us to retain only the most influential sensors for robust and efficient predictions.
Truck-Specific Models: Since sensor behaviors can vary significantly across different trucks, a dedicated model is trained for each truck, ensuring model performance aligns with vehicle-specific characteristics.
This approach ensures scalability, adaptability, and precision, even when working with heterogeneous sensor data across a fleet of haul trucks.
Solution Workflow
Step 1: Model Prediction
Once the model is trained, it is applied to each stopped cycle to determine the probability of loading and unloading events.
A loading stop is identified when the model assigns a high loading score and a low unloading score.
An unloading stop is identified when the unloading score is high, and the loading score is low.
An idling stop occurs when both scores are low or similar.
Measuring Accuracy
When ground truth is unavailable, how can we assess the accuracy of predictions?
The reality is—we can’t measure it directly.
Instead, we leverage our understanding of expected behavior to establish a close proxy. A well-structured sequence should follow a pattern where Loading and Unloading stops alternate, with Idling stops interspersed in between.
Ex. Loading → Moving → Idling → Moving → Idling → Moving → Unloading → Moving → Idling → Moving → Loading → Moving → Unloading ……
To approximate accuracy, we analyze deviations from this expected sequence, identifying inconsistencies.
Step 2: Post Processing: Handling Deviations in Expected Sequence
Possible Deviations:
- Two consecutive loading stops detected
Opportunistic Approach:
To handle this, we attempt to identify potential alternating patterns within the sequence window that can restore the broken sequence. We achieve this by utilizing the predicted scores that exceed a relaxed threshold, allowing us to restitch the correct pattern.
Example:
**Detected sequence:
**🚛 Loading → Idling → Idling → Idling → Loading
**Fixed sequence:
**🚛 Loading → Unloading → Loading → Unloading —> Loading
Here, all three Idling stops have their respective inferred state scores greater than the relaxed threshold, allowing us to infer the missing events and reconstruct the expected sequence.
Step 3: Final Step
After Step 1, for any remaining unresolved windows, we apply a straightforward rule: "Always First or Always Last." This approach selects the first/last occurrence as the final assignment. This step ensures that we have neat cycles as the end result.
We log the accuracy after Step 1 and Step 2 to monitor progress and ensure continuous improvement over time.
Future Work
Improve the model accuracy by leveraging data from other sources.
- For ex: There is sensor data coming from the loaders too. We can do time-series analysis to understand patterns during loading and unloading cycles .
The approach described above infers the temporal information of the cycles
Develop models to predict the value of the payload sensor using available sensors